|
SMDbot
Synchronized Motor Driver bot. A part of LuAtomBot (The lualized Intel Atom bot).
NOTE: I am not a software programmer.
For me, software is nothing more than a tool to get or keep my hardware running.
Keep this in mind while browsing through code or algorithms.
Presented "as is". Some may benefit from this, others won't.
Servo controllers in toys, like the implementation in the Lego-NXT, have one big disadvantage:
Most of them are not capable of maintaining the synchronization while turning, hence your robot
(or whatever else) may move anywhere but where you would like to see it.
Although I already programmed algorithms for that purpose for CNC machinery, certainly usable for
robots too, I just wanted to do this on the propeller chip.
If finished, the software should be able to:
- perform 3 PWMs
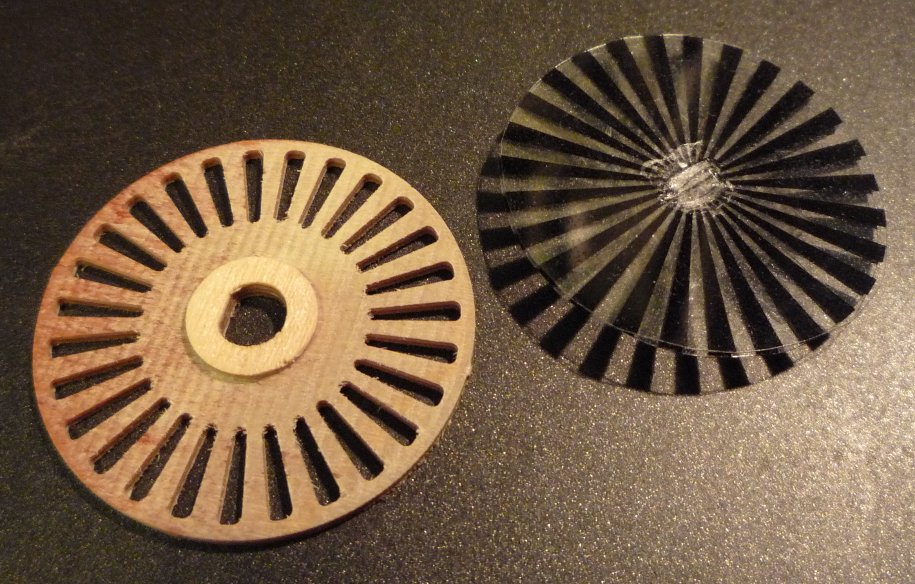
- read quadrature encoders
- perform closed loop regulation/synchronization with different speeds (PID)
- comunicate via I2C, UART and USB
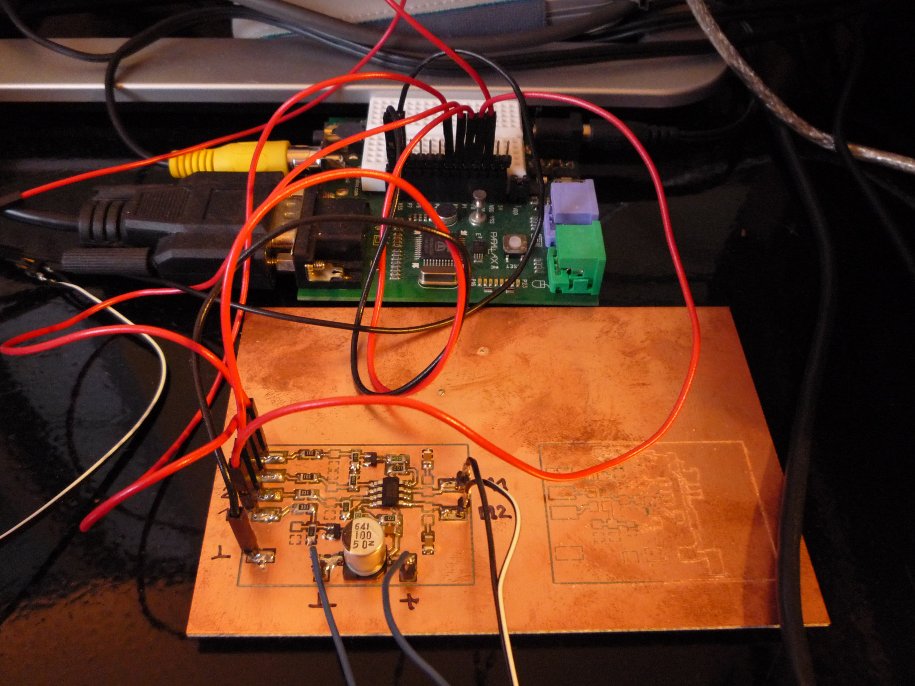
Hardware can be found here
(But not until I managed to update the pages...).
As usual, no docs, no warranty, no support.
If this deletes your harddisc, heats up your beer or goes out with your girlfriend.
Bad luck!
Just a quick hack.
Note:
Only the PWM part is implemented yet! No regulation or PID control!
I need a precise, cheap, small and reproducable solution (mechanic) for a quadrature decoder first...
Only PWM part, for now!
DOWNLOAD: prop-smdbot.zip
ASkr 5/2009
|